Remote observation system
Purpose of the system
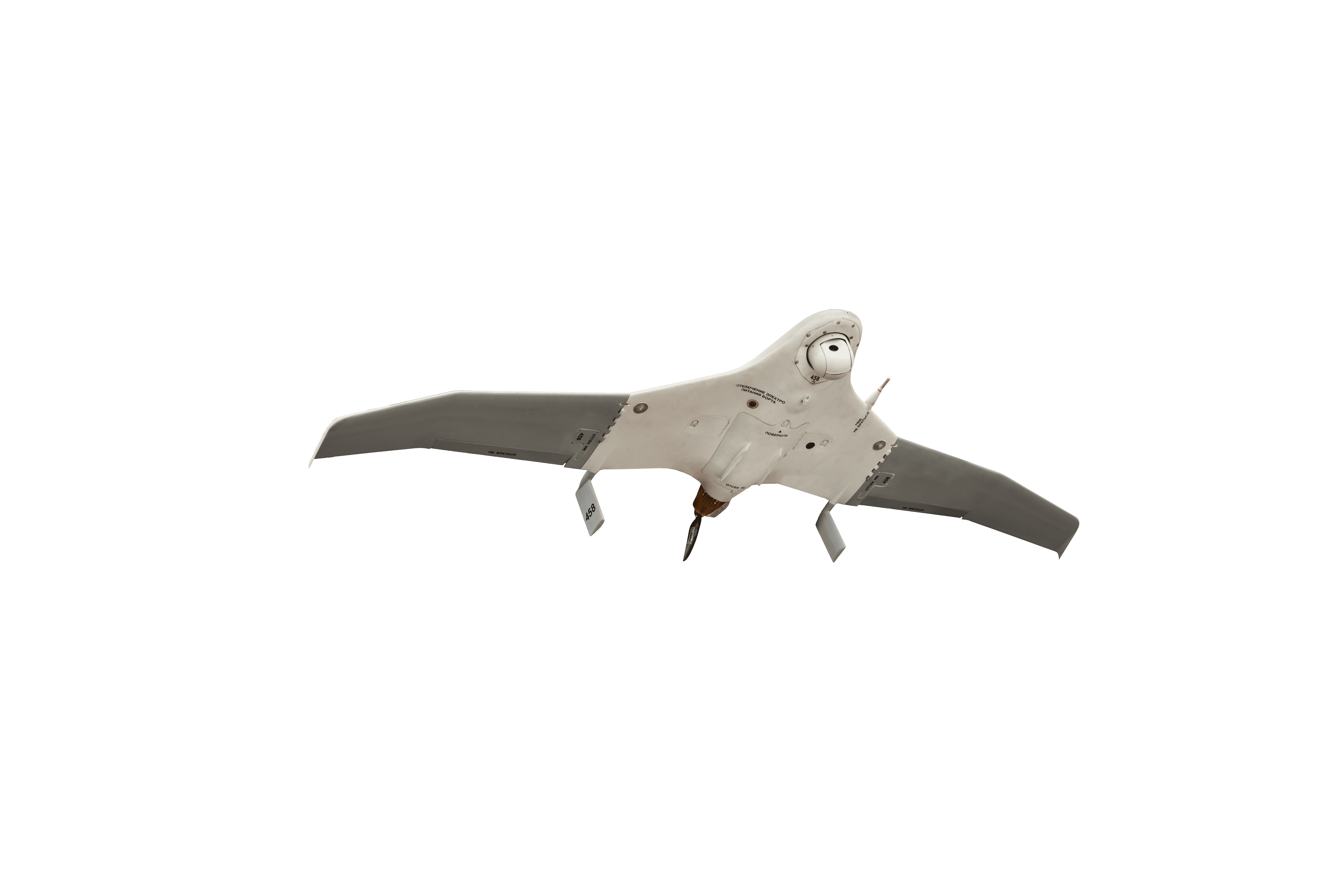
The system is designed for round-the-clock airborne optoelectronic reconnaissance and provides:
- Visual search of reconnaissance objects by the operator in real time;
- Detection and identification of reconnaissance objects;
- Pinpointing the exact location of these objects with coordinates displayed on the ground control panel via GLONASS / GPS;
- Aerial photography of the area.
Recommended applications
The system is designed for round-the-clock airborne optoelectronic reconnaissance and provides:
- Monitoring the ground situation, protecting territories and objects from the air
- Border patrols, coast guard patrols, and control of territorial waters
- Search-and-rescue support
- Monitoring the condition of highways and railways
- Monitoring the condition of oil and gas pipelines and power lines
- Environmental monitoring of land and water areas, and air basin
- Mapping and aerial photography
- Fishery exploration and control of fishing
- Aerial reconnaissance and electronic warfare
- Monitoring GSM communication networks, determining the required parameters and coordinates of mobile communication devices with positioning on an electronic map
- Ice situation monitoring
- Monitoring the ground situation during forest fires
- Monitoring settlements cut off by floods
- Monitoring the state of engineering structures during ice drift.
Technical characteristics of the system
| Maximum flight altitude above sea level, m | 5,000 |
| Maximum range of data transmission via digital video channel, km | 25–40 |
| Airspeed range, km/h | 70–130 |
| Navigation | GPS, GLONASS, airborne |
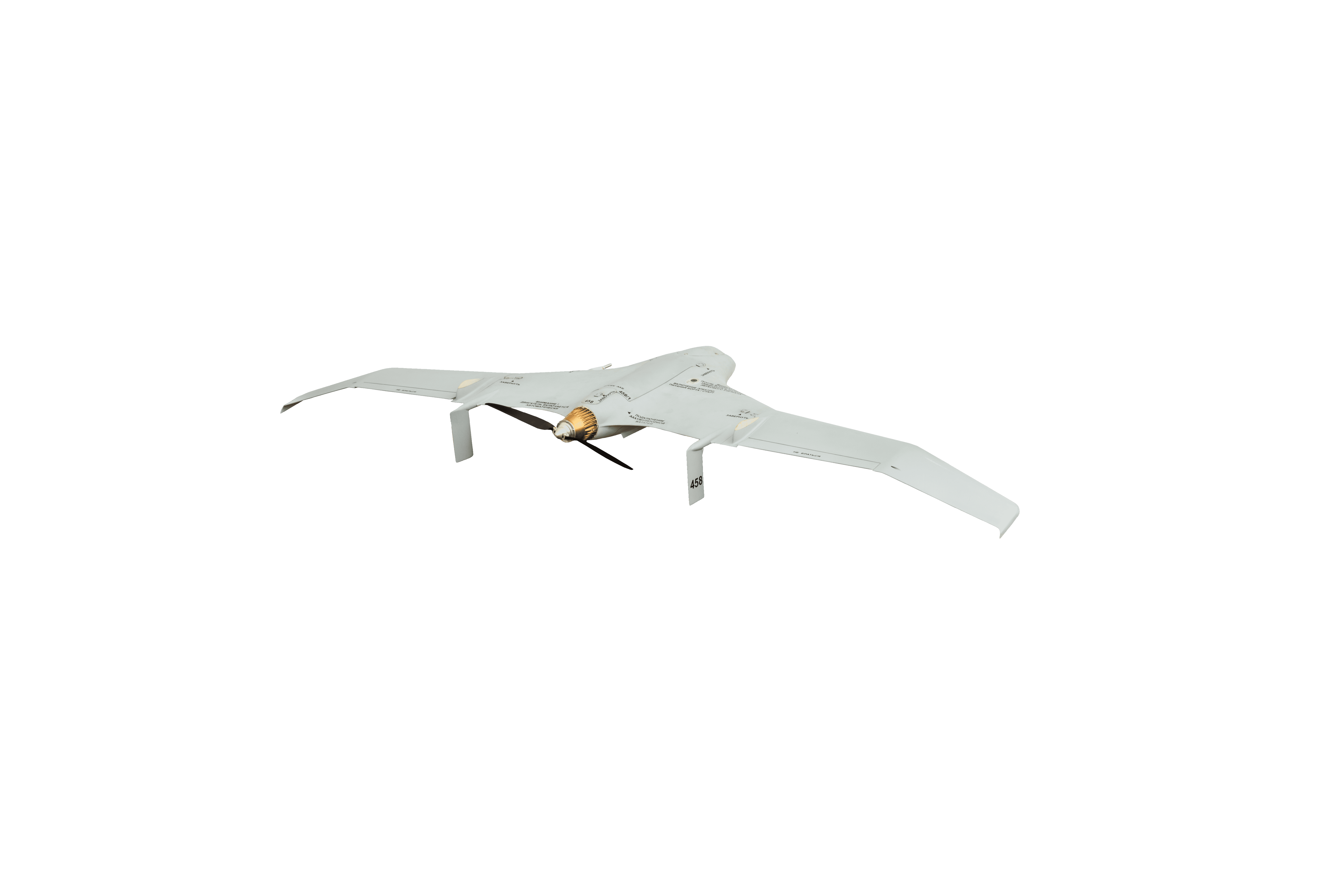
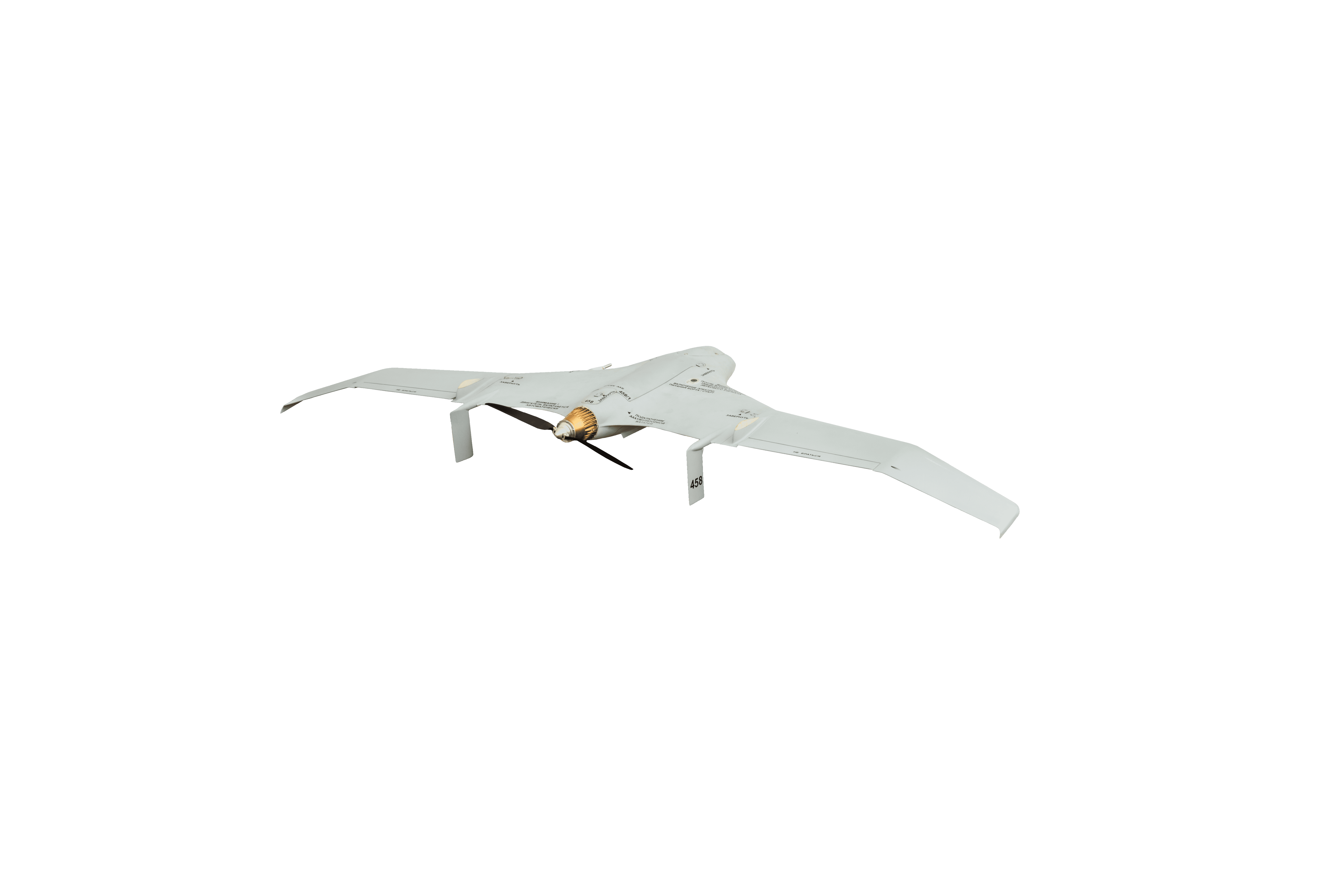
| Maximum takeoff weight, kg | 6.5 |
| Maximum payload, kg | up to 1.5 |
| Flight duration, min | minimum 180 |
| Basic flight modes * | autonomous, automatic, semi-automatic |
| Engine type | Electric engine |
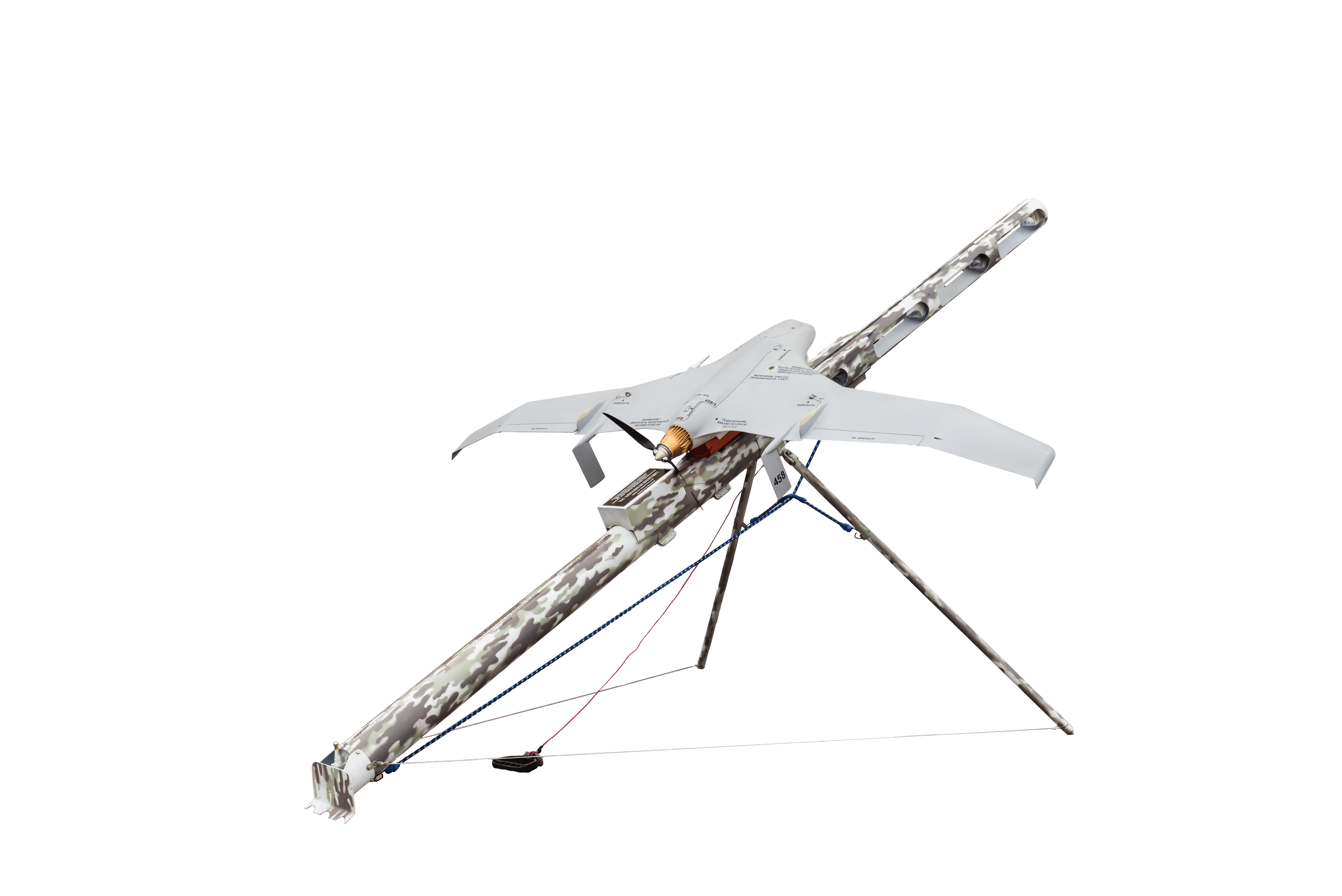
| Starting device type | pneumatic or rubber band |
| Overall dimensions of container backpacks, mm | 830×560×230 |
| Landing type | by parachute |
| Operating temperature range | -30°С to +40°С |
* Flight modes:
Autonomous — by uploading the task programme into the onboard memory before launch, the flight can be performed in the radio silence mode of the onboard data transmission facilities and the absence of UAV control from the GCS.
Automatic — the task programme is uploaded into the onboard memory before launch; it can be adjusted mid-flight from the GCS.
Semi-automatic — the UAV flight direction and/or height is controlled by commands from the GCS.
The system is delivered ready for operation after undergoing mandatory flight tests.